
Passive Thermal Imaging and C-UAS Techniques
Imposing Danger of Drones and the Urgent Need for Counter-UAS
Unmanned Aerial/Aircraft Systems (UAS/UAV, often referred to as "Drones") are aircraft and associated equipment that does not require the navigation of human pilots inside the vehicle, but could rather be controlled at remote distances using an AI or a human operator. With the advent and exponential growth of UAS, it seems, threats are incubating in the technical conveniences of drones. In September 2019, Yemen's Houthi rebels attacked two major oil installations in Saudi Arabia, damaging the oil refinement infrastructures. In recent months, Yemen's Houthi group again claimed to be responsible for another drone attack on Saudi's King Abdullah Airport, causing 16 casualties from different nationalities, the unmanned aerial vehicles dropping explosives.
While using drones for commercial and industrial purposes is another thing, weaponized drones hired by both state and non-state actors with nefarious intentions are imposing dangers and challenges to the securing of public security, personal private spaces, national defense, etc. Weaponized drones could be loaded with bombs, and munitions, or sent as invigilators to peep through, and even suggest potential risks of chemical, or biological attacks. Even commercial off-the-shelf unmanned aerial vehicles of extensive availabilities could be used for dreadful purposes. Think of the countless business implementations, sports stadiums, and critical infrastructures that locate below 400 feet of altitude, and you will be able to visualize the potential risks of drones.
Governments and non-state units worldwide are taking a series of actions to curb the abuse of drones, and one of the most convincing and powerful measures is to develop reliable Counter-Unmanned Aerial Systems (C-UAS).
Counter-Unmanned Aerial Systems or C-UAS/C-UAVs are specific techniques designed to detect, track, interrupt, or even wreck the drone to prevent unauthorized trespass of drones into certain areas. In these C-UAS facilities, various approaches are incorporated to monitor the aerial space and spot suspicious targets, including radar, visual cameras, and LWIR, MWIR, and SWIR thermal cameras. The major difficulties of C-UAS techniques lie in the scouting of Small Unmanned Aerial Vehicles, unmanned aircraft without human pilots could be made into much more compact dimensions than manned aircraft, so it is hard to discover them at earlier stages and discriminate from other nuisances like birds, insects, etc. Counter-UAS, in particular, Counter-Small Unmanned Aerial Vehicles propose significant arduousness to existing technologies. This article discusses the advantages and disadvantages of passive thermal imaging and other different approaches incorporated in C-UAS facilities.

Figure 1. shows three examples of commercial-grade drones including a quad-copter, a hexacopter, and a fixed-wing drone available in the market.
a. DJI FPV
b. DJI Matrice 600
c. Nimbus 1800 VTOL V2
Essential C-UAS Capabilities
1. DRI and Pixels on Target
It is important to understand the concept of DRI before we evaluate the capabilities of the C-UAS approaches.
DRI means Detection, Recognition, and Identification, which are the three fundamental stages involved in visual detection. In the detection stage, the object is observed (you see the object), in the recognition stage, the operator can categorize the object (you can tell whether the object is a vehicle, animal, building, etc.), and in the Identification stage, the operator can describe the object to knowledge's limit (a tank, a rabbit, an office building, etc).
Pixels on Target refers to the number of pixels the object occupies when it appears on the imaging screen. More pixels on target means more details. In Johnson's criteria, the pixel numbers needed to complete the three stages are standardized.
Johnson's Criteria are listed below:
- Detection: 2 Vertical Pixels on Target
- Recognition: 8 Vertical Pixels on Target
- Identification: 14 Vertical Pixels on Target
Pixels on target are related to the field view of the lenses, sensor image resolution, and the dimensions of the object. Objects that are larger and captured using cameras with higher resolutions, adjusted to a narrower field of view will have more pixels on target. Powerful C-UAS facilities must have the ability to produce as much as possible pixels on target at each appropriate focal length the operator chooses to ease the DRI process.
2. Long-Range Detection
As in the catastrophe that happened at King Abdullah Airport in Saudi Arabia, the drones took off at Sanaa's Airport in the Yemeni Capital hundreds of miles from the Saudi airport. The accident could have been stopped if the drones had been scouted and intercepted in the middle of the flight. Counter-Unmanned Aircraft Vehicle facilities therefore should be able to detect drones in distant locations, and in particular, the DRI capabilities of small UAS in distant areas should be paid with a high premium and enhanced. hence maximizing the time for operators to estimate the situations, and come up with rational solutions to dispose of the emergencies.
3. Countering Drone Swarms and Other Tricks
It is possible that the opposite actor will send multiple drones in a swarm rather than a single drone. The C-UAS facilities should be competent to react to multiple threats with rapid responsiveness.
Other tricks like radio jamming and dark-mode UAS might be devised to outmaneuver the counter-drone facilities. While designing C-UAS facilities, this factor should also be taken into account.
4. Being Mobile
C-UAS should be as mobile as feasible, enabling convenient rearrangements whenever and wherever needed in contests like guarding a forward operating base or a long border. Portable features are also essential when the C-UAS is assigned to mobile operations on the sea, in the air, on the ground, etc.
5. Lightweight and Compact Dimensions
A large weight is undesirable in particular in the cases of mobile C-UAS since it will lower the flexibilities and efficiencies of the mobile facilities, the result is a waste of valuable decision-making time.
Compact Dimensions are beneficial to covert operations. Dense integration of the C-UAS, therefore, is another direction that the manufacturers could explore in the future.
6. Proportionate Costs
C-UAS facilities in general are expensive. In contrast, commercial-grade drones are far more affordable. Therefore extravagant purchasing, maintenance, overhaul, and upgrading costs of C-UAS that exhaust the budget of state and non-state operators are not desirable. The C-UAS manufacturers in the future should leverage existing technologies and develop new designs to contrive less expensive C-UAS solutions.
7. Flexible Zoom Mechanisms and Locking-on Targets
In some circumstances, panoramic views of the entire domain are needed, while when it comes to the DRI of small UAS a close-up examination is required. Unrestricted zoom capabilities are crucial in especial to ensure the flexible altering of FOVs and to allow one to fasten on the interested targets with arbitrariness. No matter whether the zoom mechanism of the C-UAS is motorized or manual, continuous or step-zoom, the zoom process should be agile and quick, so that the operator could save time in asses emergencies.
The Counter-UAS should also incorporate an automated focus calibrate mechanism so that while zooming the focus on targets is retained all the time.
Evaluation of Passive Thermal Imaging and other techniques as C-UAS Approaches
Visible, SWIR Imaging and Radar as C-UAS Approaches
Measures such as Visual Imaging, SWIR Imaging, and Radar are all Active Imaging techniques, which means the detection is based on electromagnetic radiations emitted from a source, reflected from the targets rather than radiations emitted from the target themselves. Visible imaging or SWIR imaging relies on light from external light sources such as the sun, urban glow, assembled illuminators, and other terrestrial light sources. Operating based on light reflection, visible/SWIR imagers have the advantage of higher similarities to human sight, enabling an easier recognition process. Furthermore, visible and SWIR sensors with high image resolutions are much more obtainable and affordable than high-resolution MWIR/LWIR sensors, therefore images captured using visible and SWIR cameras often feature more pixels on target, which are crucial to C-UAS. However, visible/SWIR imaging is subject to adverse effects under poor light conditions such as night, fog, rain, etc. which restrict its usage. And because atmospheric absorption for visible and SWIR lights is strong, their detection capabilities will also be attenuated to a significant extent as detection distance increases.
A Radar transmits radio waves and receives the reflected signals to determine the position, relative velocities, and outlines of the targets using the Doppler Effect. High-resolution 2D and 3D imaging could be realized using SAR or ISAR techniques. Because atmospheric absorption is weaker than radio frequencies, and weather phenomena and ambient temperature will have little impact on the operation of radar, radar is eminent in the aspect of long detection distance and weather/thermal insensitivities.
Nevertheless, radar is also ripe with problems as a counter-UAS approach. First, radar differentiates targets from backgrounds according to their different dielectric constants, this means under normal circumstances the RF waves will be reflected or scattered at the boundaries between solid objects and air. However, radar-absorbing materials containing resistive or magnetic compositions might be utilized on drones or warfare vehicles, making the targets "invisible" to radar. Second, radar is susceptible to jamming measures, where RF signals with the same frequencies originating outside the radar are transmitted on purpose to shield the targets. Radio jamming is a common measure implemented from governments as electronic warfare tacit. Third, radar is also subject to clutters and noises, these include multi-path echoes from uninterested objects and interference of RF waves.
MWIR and LWIR Passive Thermal Imaging as C-UAS Approaches
MWIR (Mid Wave Infrared) and LWIR (Long Wave Infrared) Thermal Imaging refers to thermal imaging operating in the 3-5 micron (MWIR) and 8-12 micron (LWIR) spectral ranges. These two are categorized as Passive Thermal Imaging. The working principle is that MWIR and LWIR thermal cameras collect and focus infrared radiations emitted from objects (All objects with temperatures above absolute zero emit infrared radiations) through MWIR or LWIR lenses onto an infrared sensor that exists to visualize the thermal radiations from objects.
The sensors inside the thermal imagers could be divided into two classes: Cooled Photon Sensors and Uncooled Thermal Sensors. A Photon sensor is often assembled with a cooler, and produces a direct electrical effect after absorbing infrared radiations, while a thermal sensor produces a temperature change after absorbing the infrared waves, and generating an electrical effect, the material properties of the detectors affect how temperature changes induce the electrical effect. In comparative terms, Photon sensors are more sensitive, while uncooled thermal sensors are less expensive. In the current market, LWIR thermal imagers routinely incorporate uncooled sensors, and MWIR thermal imagers incorporate cooled sensors.
There are manifold benefits of MWIR and LWIR thermal imaging. Because MWIR and LWIR cameras produce an image using the gathered thermal radiations generated from objects, MWIR and LWIR thermal imaging are independent of external light conditions, enabling detection under harsh light conditions at night or in disadvantageous weather. According to the theories of Atmospheric Windows, the transmission rate of MWIR and LWIR radiations in the atmosphere are higher than that of visible and SWIR spectrum, which means MWIR and LWIR energies can propagate further distances in the atmosphere without being absorbed and that MWIR and LWIR imagers can receive and visualize thermal emissions from drones far from them.

Figure 2. Atmospheric Windows
Compare with radar, MWIR and LWIR thermal cameras, albeit being less capable of handling long distances, are more reliable for operations in contested environments. For example, the opposite actors might utilize radar-absorbing materials to manufacture drones, making them become unperceivable phantoms. Or the actors might use radio jamming to disrupt the radio signals the detection could even be hampered if there should be a radio device (even without hostile intentions) near transmitting waves of the same RF frequencies with the radar.
Whilst in the case of MWIR and LWIR thermal imaging, such concerns are less problematic. All objects above absolute zero possessing thermal energies in intrinsic emit infrared radiations, as long as there is a temperature difference between the drones and the background environment, no matter what materials the drones are made of, the drones are detectable. There is no such measure so far to "thermal-disguise" drones as in the case of radar. There is also no approach like radio jamming to obstruct the thermal signals, although thermal imagers are still susceptible to thermal noises.
Furthermore, LWIR and SWIR thermal imaging are passive. Another problem with active imaging techniques is that active imagers send either optical or radio signals themselves, so the opposite actor might find the position of the C-UAS. Passive thermal imaging is a promising alternative to rid of the problem.
However, MWIR and LWIR imaging also have their weaknesses. LWIR and MWIR sensors often contain fewer pixels than visible and SWIR sensors, so the pixels on target will be reduced, delivering fewer imaging details and causing difficulties in the recognition and identification of drones. With fewer POTs, it will be hard to differentiate nuisance clutters from drones at long distances (e.g. A fixed-wing UAS might look similar on the imaging screen to a bird from afar).
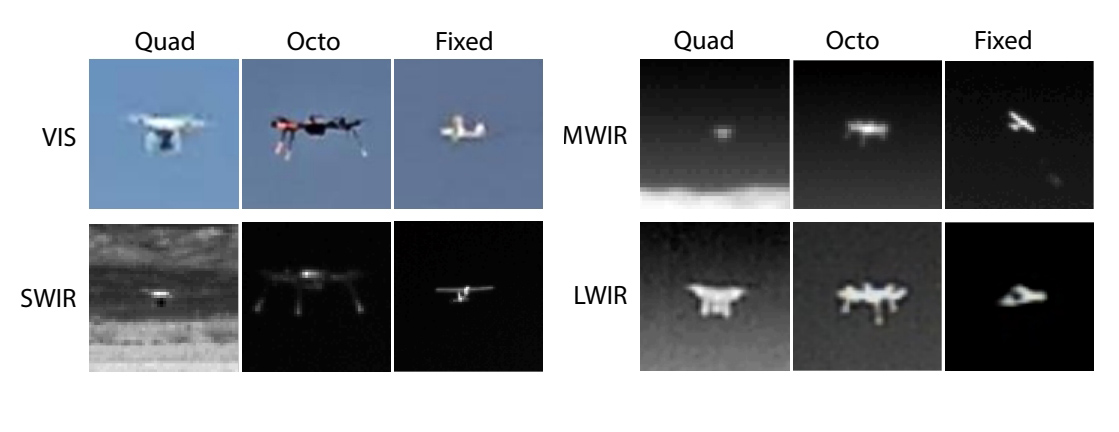
Figure 3. shows a series of pictures of a quad-copter, an octocopter, and a fixed-wing drone captured using VIS, SWIR, MWIR, and LWIR cameras. As we could perceive in the pictures, the targets in pics captured using MWIR and LWIR cameras with lower image resolution and therefore fewer pixels on target are more difficult to assess than that of the other two. The fixed-wing drone in the MWIR image carries a close resemblance to a bird.
Another negative factor is thermal noise. In normal conditions, drones moving at high altitudes are of higher temperatures than the cold background and will appear in different colors and brightness on the thermal images. However, as the drones descend closer to the horizon the temperatures of the environment rise, resulting in an angular position above the ground at which the drones are invisible to the thermal imager (this angular position is called "thermal equivalence angle", and we will discuss it in detail in the later sector). This nature of thermal imagers is disadvantageous to counter-drone monitoring. Other uninterested objects of similar temperatures could all be regarded as thermal noises harassing the detection of drones.
The sensor-self-heating problem producing thermal noises is in particular a hindrance to LWIR imagers, which oftentimes utilize uncooled microbolometer detectors. Whilst MWIR imagers which are often integrated with cooled FPA detectors feature higher sensitivities with lower thermal noise.
Most Infrared-transmitting materials selected to make LWIR and MWIR thermal camera lenses have coefficients of thermal coefficients (CTE) several orders of magnitude higher than that of the visible lens materials. The refractive index of the lens assemblies is responsive to temperature changes, leading to a phenomenon called thermal defocus (This is, the deviation of the lenses' focal points from their designed positions resulting from the temperature variations). Athermalzed designs such as passive optical athermalized lenses could be incorporated to balance out the thermal defocus effect.
Comparison between MWIR and LWIR Thermal Imaging
1. Thermal Radiation Gathering Capabilities
As mentioned in the former paragraphs, passive thermal imaging operates on the mechanism of collection of thermal energies. The thermal radiation gathering capabilities are an important indication in determining the thermal imager's performance.
Thermal Flux refers to the total thermal emission from the target object and the background. According to Planck's Law, the higher the temperature, the higher the spectral radiant emittance (at all wavelengths) and the shorter the peak wavelength of the emissions. Under the normal atmospheric temperature of 300K, the peak wavelengths of emission reside at the 8-12 micron LWIR spectral regions.
Thermal flux from the objects has to travel through the atmosphere to reach the imager. Since the atmosphere is not a vacuum, but rather consists of a mix of different gases (such as nitrogen, CO2, and O2) and particles (dust, dirt, vapor), it absorbs, reflects, refracts, and scatters electromagnetic radiation. So atmospheric transmission is another relevant factor affecting the thermal radiation gathering capabilities.
The atmosphere is more transparent to LWIR radiations than to MWIR radiations. This fact added to the evidence that the emission peak positioned in the LWIR region at normal temperatures, implies a greater volume of thermal radiation allowed to enter the imager. Hence, LWIR thermal cameras in theories work well in most normal circumstances including counter-UAV ("normal" here means the environment is under an atmospheric temperature of 300K.).
At higher temperatures, the emission peak shifts to short wavelengths, this is the reason that MWIR thermal imagers work better in high-temperature environments. Referring to atmospheric transmission, in general, the absorption of MWIR radiations in vapors is much less significant than for LWIR radiations. Hence MWIRs are more recommendable in humid and hot ocean climates.
2. Thermal Contrast
Thermal Contrast is another critical element that influences the clarity of the thermal image. According to the different temperatures, thermal imagers distinguish one object from another or the background using different brightness and colors. Because MWIR cameras often incorporate cooled sensors with higher sensitivities than the uncooled sensors incorporated in LWIR cameras, the thermal contrast of MWIR imagers is in nature greater than that of LWIR cameras. Objects of similar temperatures to the drones are considered a nuisance that confuses the C-UAS. It has also been proven that MWIR imagers are more capable of clutter and nuisance rejection than LWIR counterparts. As the detection range lengthens, the rejection of clutter nuisance will grow more challenging as there are fewer pixels on both the targets and the nuisance. Thus in long-range detections, MWIR imagers with distinct thermal contrast are often selected in preference to LWIR imagers.
The Temperature Equivalence Angle (TEA) provides an angular measure that reflects the abilities of the thermal imagers to discriminate targets from the background. At high altitudes, most drones are of higher temperatures than the background, but as drones approach the horizon environmental temperature begins to rise, gradually reducing the target contrast. The TEA refers to the angle above the horizon at which the thermal contrast between targets and the background becomes zero so that the drones are invisible in the thermal image. MWIR thermal imagers allow narrower TEA than LWIR Thermal Imagers.
3. Weight and Aperture Issues of MWIR and LWIR Lenses
Self-heating of the thermal camera creates thermal noise and leads to confusion about the target thermal signals. The result is the increase of NETD (Noise Equivalent Temperature Difference) and loss of sensitivities. A cooled photon detector, therefore, is much more sensitive than uncooled thermal detectors.
MWIR imagers often incorporate cooled detectors (e.g. HgCdTe detectors, Quantum Well detectors, Stibide detectors), whilst LWIR imager often utilizes uncooled detectors (e.g Vanadium Oxide detectors, InSb FPA).
The f-number or f stop, or f/# is a measure of the light-gathering power of a camera, in the case of thermal cameras, the thermal radiation gathering power. f number=Focal Length of Camera Lens/Diameter of the Lens Aperture. A cooled detector with higher sensitivities permits higher f-numbers (and hence tinier lens apertures), whilst an uncooled detector with lower sensitivities should have low f-numbers (hence larger apertures to allow enough radiation to enter) if the LWIR lenses were to obtain the same focal length with MWIR lenses. Therefore, the MWIR Thermal Camera Lenses could be made much more compact than LWIR Thermal Camera Lenses, saving the lens production cost and meanwhile reducing the weight of C-UAS. So when it comes to Mobile C-UAS facilities, MWIR imagers should be the prior option since massive weights will burden the moving of the facilities. Besides, compact dimensions make MWIR more preferable candidates for C-UAS as the risk of being exposed reduces.
In similar manners, an MWIR thermal camera lens of the same aperture as an LWIR thermal lens could have longer focal lengths than the LWIR lens because of the higher f-number allowed. And the distinctive thermal contrast of MWIR imaging strengthens its capabilities to reject nuisance and clutters at longer distances. Therefore MWIR cameras are more prevalent in the market to date than LWIR cameras for a mission requiring long detection distances.
With the unceasing efforts of the engineering team, Shalom EO has achieved a technical breakthrough in developing an Ultra-Lightweight 90-1100mm f/5.5 Continuous Zoom MWIR Thermal Imaging Camera Lens Module. The 223mm diameter, 295.51mm length CZ Lens assemblies weigh 4.2 kg, providing an unrivaled comprise between long focal lengths and weight issues. The lenses are excellent when assigned to various missions requiring long detection ranges and high thermal contrast, such as Counter-Unmanned Aerial Vehicles (C-UAV/C-UAS).

Figure 4. Shalom EO's Ultra-Lightweight 90-1100mm f/5.5 Continuous Zoom MWIR Thermal Imaging Camera Lens Module
Costs
LWIR imaging is the more conventional and economical option. MWIR cameras, on the other hand, often incorporates cooled photon detectors (which are quite expensive), MWIR thermal imaging cameras tend to be more expensive than LWIR cameras.
Conclusion
As drones increasingly become capable weapons of illegal intrusions, Government and non-state actors face significant changes in developing matured, effective, and affordable C-UAS. Passive LWIR and MWIR thermal imaging are two excellent approaches to realizing C-UAS with high environmental reliabilities, substantial long-distance capabilities, and exceptional abilities to tackle anti-detection tricks. Among them, MWIR thermal imaging featuring better long-distance target contrast is the mainstream in the current market. Further research is needed to give more elaborate evaluations of the best approaches to C-UAS.
Related Articles
Related Products

Tags: Passive Thermal Imaging and C-UAS Techniques